Xiangyu Chen
Ph.D. Student, MARS Lab, School of MAE, Nanyang Technological University, Singapore.

MARS Lab, School of MAE
Nanyang Technological University
Singapore
I am a Ph.D. student in the Multimodal AI Research Society (MARS) Lab, School of Mechanical and Aerospace Engineering, Nanyang Technological University (NTU), Singapore, advised by Prof. Jianfei Yang (Stanford World’s Top 2% Scientists). I also collaborate closely with Prof. Chen Wang and Prof. Chaoqun Wang.
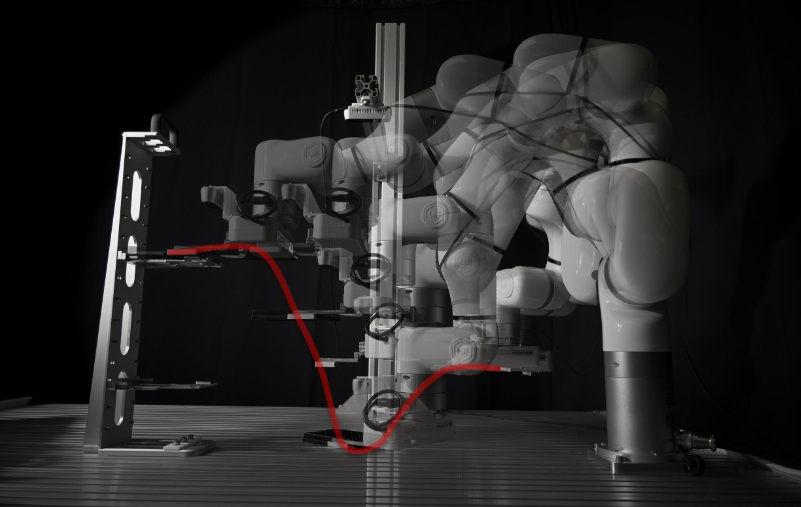
My research centers on robotic manipulation and dexterous manipulation. I am currently building embodied AI agents for life science that pair foundation models with robotic arms to automate Chem/Bio laboratory work. My goal is a robust, safe, and easy-to-use agent that takes over the repetitive bench tasks for biochemical researchers — much like Copilot assists programmers and ChatGPT assists writers.
Before joining NTU, I earned my M.Eng. in Control Science and Engineering from Shandong University and my B.Eng. in Electrical Engineering and Automation from the University of Jinan, where I worked on practical applications of mobile robots.
Outside of research, I am a keen basketball player and enjoy video games — especially Roguelikes and Pokémon — and, like many Ph.D. students, I have recently taken up photography.
Feel free to email me if our interests align — I am always happy to discuss research and potential collaborations.
news
| Apr 15, 2026 | 🎉 Our paper “A2A: Action-to-Action Flow Matching for Robot Policy Learning” is accepted by RSS 2026! |
|---|---|
| Feb 27, 2026 | 🎉 Our paper “M³A Policy: Mutable Material Manipulation Augmentation Policy through Photometric Re-rendering” is accepted by CVPR 2026 (Findings)! |
| Jan 15, 2026 | 🎉 Our paper “RM-RL: Role-Model Reinforcement Learning for Precise Robot Manipulation” is accepted by ICRA 2026! |
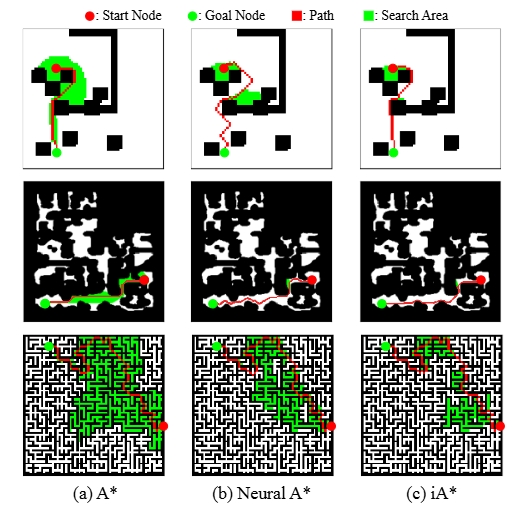
| Oct 01, 2025 | 🎉 Our paper “iA*: Imperative Learning-based A* Search for Pathfinding” is accepted by IEEE RA-L! |
| Dec 15, 2024 | 🎓 Received the Ph.D. offer from NTU — beginning my Ph.D. study in 2025! |