@inproceedings{chen2026rmrl,title={RM-RL: Role-Model Reinforcement Learning for Precise Robot Manipulation},author={Chen, Xiangyu and Zhou, Chuhao and Liu, Yuxi and Yang, Jianfei},booktitle={IEEE International Conference on Robotics and Automation (ICRA)},year={2026},}
arXiv
Rethinking Implicit Spatial Representation in Visuomotor Policy Learning
Xiangyu Chen, Yuxuan Hu, Chuhao Zhou, and Jianfei Yang
@article{chen2026rethinking,title={Rethinking Implicit Spatial Representation in Visuomotor Policy Learning},author={Chen, Xiangyu and Hu, Yuxuan and Zhou, Chuhao and Yang, Jianfei},journal={arXiv preprint arXiv:2606.15232},year={2026},}
RSS
A2A: Action-to-Action Flow Matching for Robot Policy Learning
Jindou Jia, Gen Li, Xiangyu Chen, Tuo An, Yuxuan Hu, Jingliang Li, Xinying Guo, and Jianfei Yang
@inproceedings{jia2026a2a,title={A2A: Action-to-Action Flow Matching for Robot Policy Learning},author={Jia, Jindou and Li, Gen and Chen, Xiangyu and An, Tuo and Hu, Yuxuan and Li, Jingliang and Guo, Xinying and Yang, Jianfei},booktitle={Robotics: Science and Systems (RSS)},year={2026},}
arXiv
MARS Policy: Multimodality Only When It Matters
Jindou Jia, Tuo An, Yuxuan Hu, Gen Li, Jingliang Li, Bohan Hou, Xiangyu Chen, Jiaqi Bai, Bofan Lyu, and Jianfei Yang
@article{jia2026marspolicy,title={MARS Policy: Multimodality Only When It Matters},author={Jia, Jindou and An, Tuo and Hu, Yuxuan and Li, Gen and Li, Jingliang and Hou, Bohan and Chen, Xiangyu and Bai, Jiaqi and Lyu, Bofan and Yang, Jianfei},journal={arXiv preprint arXiv:2605.29766},year={2026},}
arXiv
FLASH: Efficient Visuomotor Policy via Sparse Sampling
Jiaqi Bai, Jindou Jia, Yuxuan Hu, Gen Li, Xiangyu Chen, Tuo An, Kuangji Zuo, and Jianfei Yang
@article{bai2026flash,title={FLASH: Efficient Visuomotor Policy via Sparse Sampling},author={Bai, Jiaqi and Jia, Jindou and Hu, Yuxuan and Li, Gen and Chen, Xiangyu and An, Tuo and Zuo, Kuangji and Yang, Jianfei},journal={arXiv preprint arXiv:2605.15492},year={2026},}
2025
RA-L
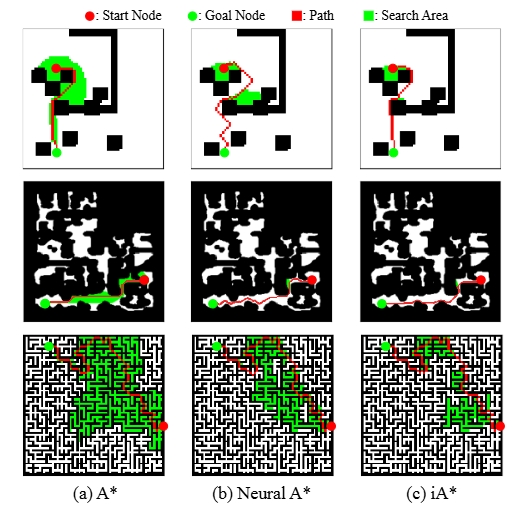
iA*: Imperative Learning-based A* Search for Pathfinding
@article{chen2025iastar,title={iA*: Imperative Learning-based A* Search for Pathfinding},author={Chen, Xiangyu and Yang, Fan and Wang, Chen},journal={IEEE Robotics and Automation Letters (RA-L)},year={2025},}